Facebook
Linkedin
Pinterest
Tumblr
Twitter
WordPress
Home
Diễn đàn
Shopping
Ăn ngon
Nếm
Bánh ngon
Các loại mứt
Các món ăn chơi
Các món xôi
Các món chè
Thức uống
Quà vặt
Dinh dưỡng
Điểm tâm
Cơm nhà
Nấu gì hôm nay
Thực đơn ăn kiêng
Chọn thực phẩm
Chuyên gia nói gì
Mẹo vặt trong bếp
Làm đẹp
Làm đẹp cùng chuyên gia
Dáng đẹp
Mặc đẹp
Phụ kiện
Phong cách trang điểm
Nụ cười xinh
Môi đẹp
Răng miệng
Tư vấn làm đẹp
Trang điểm
Trang điểm môi
Trang điểm mắt
Trang điểm mặt
Chăm sóc chân tay móng
Mẫu nail đẹp
Chăm sóc tay
Chăm sóc móng
Chăm sóc chân
Mỹ phẩm
Nước hoa
Mặt nạ dưỡng da
Đồ trang điểm
Mỹ phẩm thiên nhiên handmade
Tóc đẹp
Làm tóc & Kiểu tóc đẹp
Chăm sóc tóc & Dưỡng tóc
Làm đẹp da
Tắm trắng
Spa tại nhà
Trị mụn
Chống nắng
Chăm sóc da mặt
Làm trắng da
Chống lão hóa
Chăm sóc da toàn thân
Tẩy lông
Trị nám, trị sẹo, trị tàn nhang
Khử mùi hôi cơ thể, Tắm
Điều trị da
Giảm cân
Giảm mỡ bụng
Thực đơn ăn kiêng
Chế độ ăn kiêng
Thể dục
Fitness
Massage
Detox
Giảm cân 2
Làm Mẹ
Chuẩn bị mang thai
Bầu – Sinh nở
Chăm sóc
Các món ăn cho bé
Bệnh thường gặp
Dạy dỗ
Chia sẻ – Hỏi đáp
CC-Khác
Yêu – Hôn nhân
Tình yêu – Giới tính
Tư vấn hôn nhân
Tâm sự
Ngoại tình
Chuyện vợ chồng
Góc chia sẻ
Phòng the
Chăm sóc – Tư vấn
Giữ lửa
Cưới hỏi
Đám cưới
Đám hỏi – Đám nói
Đồ đạc – Dụng cụ – Phụ kiện
Sức khỏe
Các loại bệnh
Sức khỏe gia đình
Chăm sóc – Bảo vệ sức khỏe
Thuốc và sức khỏe
Sống vui
Thói quen tốt
Ăn uống và sức khỏe
Sức khỏe giới tính
XEM THÊM
Khoa học
1001 bí ẩn
Công nghệ mới
Đại dương học
Khám phá khoa học
Khoa học vũ trụ
Môi trường
Phát minh khoa học
Sinh vật học
Thế giới động vật
Ứng dụng khoa học
Công nghệ
Phần mềm
Thiết Kế – Đồ Họa
Nhiếp ảnh Main
Xã hội
Tin trong nước
Tin thế giới
Du lịch
Điểm đến
Khám phá
Nhà cửa
Nhà xanh
Nhà xinh
Đời sống
Khéo tay
Tử vi
Đắc nhân tâm
Công sở
Chuyện công sở
TÌM KIẾM
Cha Mẹ Của Con
Home
Diễn đàn
Shopping
Ăn ngon
Nếm
Bánh ngon
Các loại mứt
Các món ăn chơi
Các món xôi
Các món chè
Thức uống
Quà vặt
Dinh dưỡng
Điểm tâm
Cơm nhà
Nấu gì hôm nay
Thực đơn ăn kiêng
Chọn thực phẩm
Chuyên gia nói gì
Mẹo vặt trong bếp
Làm đẹp
Làm đẹp cùng chuyên gia
Dáng đẹp
Mặc đẹp
Phụ kiện
Phong cách trang điểm
Nụ cười xinh
Môi đẹp
Răng miệng
Tư vấn làm đẹp
Trang điểm
Trang điểm môi
Trang điểm mắt
Trang điểm mặt
Chăm sóc chân tay móng
Mẫu nail đẹp
Chăm sóc tay
Chăm sóc móng
Chăm sóc chân
Mỹ phẩm
Nước hoa
Mặt nạ dưỡng da
Đồ trang điểm
Mỹ phẩm thiên nhiên handmade
Tóc đẹp
Làm tóc & Kiểu tóc đẹp
Chăm sóc tóc & Dưỡng tóc
Làm đẹp da
Tắm trắng
Spa tại nhà
Trị mụn
Chống nắng
Chăm sóc da mặt
Làm trắng da
Chống lão hóa
Chăm sóc da toàn thân
Tẩy lông
Trị nám, trị sẹo, trị tàn nhang
Khử mùi hôi cơ thể, Tắm
Điều trị da
Giảm cân
Giảm mỡ bụng
Thực đơn ăn kiêng
Chế độ ăn kiêng
Thể dục
Fitness
Massage
Detox
Giảm cân 2
Làm Mẹ
Chuẩn bị mang thai
Bầu – Sinh nở
Chăm sóc
Các món ăn cho bé
Bệnh thường gặp
Dạy dỗ
Chia sẻ – Hỏi đáp
CC-Khác
Yêu – Hôn nhân
Tình yêu – Giới tính
Tư vấn hôn nhân
Tâm sự
Ngoại tình
Chuyện vợ chồng
Góc chia sẻ
Phòng the
Chăm sóc – Tư vấn
Giữ lửa
Cưới hỏi
Đám cưới
Đám hỏi – Đám nói
Đồ đạc – Dụng cụ – Phụ kiện
Sức khỏe
Các loại bệnh
Sức khỏe gia đình
Chăm sóc – Bảo vệ sức khỏe
Thuốc và sức khỏe
Sống vui
Thói quen tốt
Ăn uống và sức khỏe
Sức khỏe giới tính
XEM THÊM
Khoa học
1001 bí ẩn
Công nghệ mới
Đại dương học
Khám phá khoa học
Khoa học vũ trụ
Môi trường
Phát minh khoa học
Sinh vật học
Thế giới động vật
Ứng dụng khoa học
Công nghệ
Phần mềm
Thiết Kế – Đồ Họa
Nhiếp ảnh Main
Xã hội
Tin trong nước
Tin thế giới
Du lịch
Điểm đến
Khám phá
Nhà cửa
Nhà xanh
Nhà xinh
Đời sống
Khéo tay
Tử vi
Đắc nhân tâm
Công sở
Chuyện công sở
Trang chủ
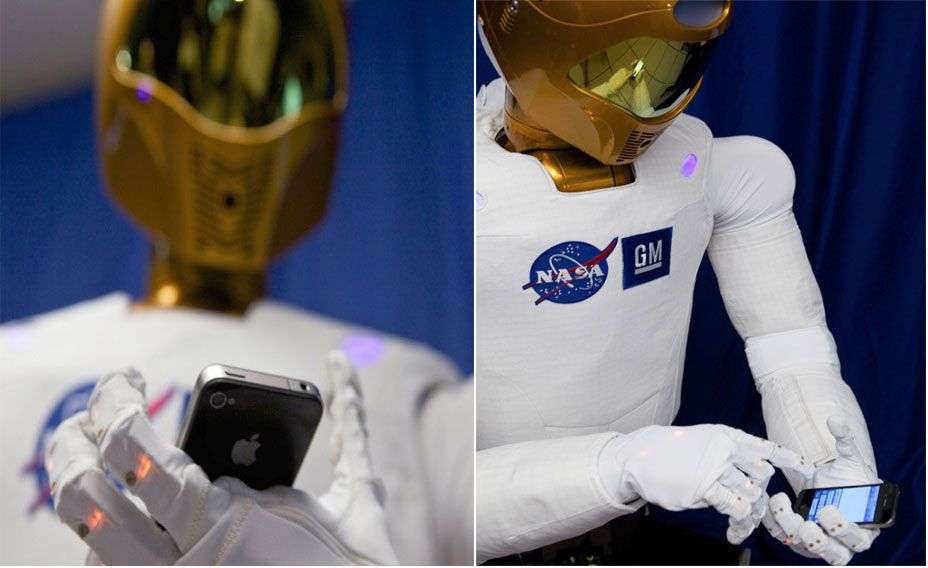
Phi hành gia người máy: Lỗi hẹn với ISS
Phi hành gia người máy: Lỗi hẹn với ISS
Phi hành gia người máy: Lỗi hẹn với ISS
Nhiều người xem
Ăn nhiều thực phẩm chiên có nguy cơ mắc bệnh gì?
Mẫu máy bay được phi công sử dụng nhiều nhất thế...
9 cơ chế tự bảo vệ của thực vật
Làm sao để tránh căng thẳng trong phòng thi
Hậu duệ của khủng long làm bố ở tuổi 111
Chọn vật may mắn trang trí năm mới theo phong thủy
Trang trí vòng cho cổ áo thêm lạ mắt
Lụt lớn ở châu Phi
10 thành phố “già” nhất thế giới
Nghiên cứu sự ra đời của mặt trời
Những tip giữ an toàn cho bé mẹ cần đặc biệt...
Các loài động vật như “hóa điên” mỗi khi xảy ra...
Học cách làm kẹp tóc hoa lãng mạn cho cô nàng...
Bạn có biết con người đang uống nước tiểu khủng long?
Bí quyết giúp bạn đẹp như hotgirl
Awesome Miner v4.2.4 Ultimate Plus-P2P
Hướng dẫn 2 kiểu cột tóc vintage điệu đà
4 cách giảm cân nhanh chóng nhờ mật ong và quế
TeraByte Unlimited BootIt Bare Metal v1.42 Retail-P2P
Cách làm bánh bao kim sa nhân trứng sữa
Chồng mình toàn yêu bằng miệng để dỗ vợ
Máy bay không người lái chụp ảnh hệ sinh thái biển
Những khoảnh khắc siêu ấm áp của David Beckham bên con...
Thiết bị tiết lộ tâm trạng của sinh viên trong giờ...
Phương pháp trồng cây thanh long ruột đỏ (Đài Loan)